Locomotion of Boneless Creatures with Distributed Control
We are interested in exploring whether we can achieve complex, organized behaviours using a distributed network of localized controllers that are tasked with collectively moving a soft body with no rigid skeleton. Given various elastic and deformable body plans, we would like to see what gaits emerge based on body shape and body material properties. Through experimentation, we comment on the effectiveness of genetic optimization over policy gradient optimization, and the expressive capability of local controllers with limited views of the world compared to single, comprehensive controllers.
Optimization methods
We optimized policies using a genetic algorithm (GA) and using Proximal Policy Optimization (PPO).
Genetic optimization
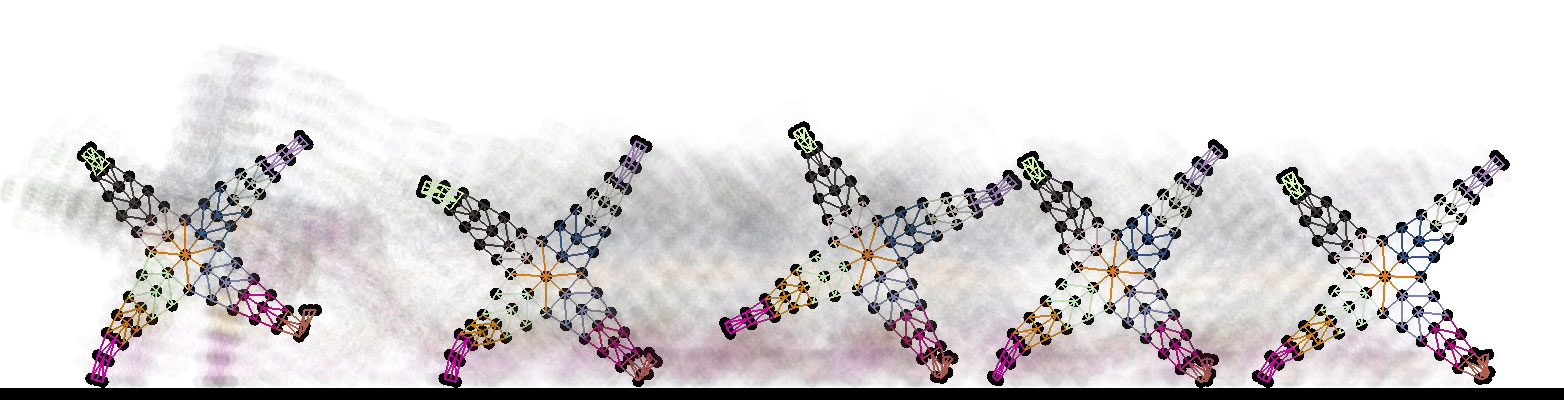
Tetrapus with high springiness
Tetrapus with low springiness
Proximal Policy Optimization
PPO creates stochastic policies, which are not as effective as those found using GA.
Control schemes
We wanted to compare how policy effectiveness changes when you go from a single controller with full state knowledge to a set of distributed controllers, with only local state knowledge and the ability to pass information to neighbouring controllers.
Worm with global controller
Worm with local, communicating controllers
We also tested the use of local controllers without communication to see how well a policy can operate while blind to the state of the rest of the creature.
Worm with local controllers, but no communication
Extras
Some alternate body plans and non-optimal policies from the genetic algorithm population.
A horse body plan, optimized with GA

Tetrapus somersaulting instead of walking
Worm somersaulting instead of walking

When they play your song at the club